

Introduction
One of the most important goals for the reliability analysis is “Predicting the reliability of the system for a specified mission time” [1].
There are plenty of techniques accessible to be used to reach this goal.
In order to predict the reliability of a system, a proper reliability model must be selected.
Fault Tree Analysis (FTA) is one of the most developed and dominant techniques in reliability studies.
First in 1962, FTA techniques have been created at Bell Telephone Laboratories [2].
Nowadays, FTA is widely used for quantitative reliability analysis and safety assessment of complex and critical engineering systems [3].
In fact, FTA is a logical tree demonstrating the ways in which a system fails.
The tree starts with an unpleasant event (top event), and all conceivable paths for top event to occur are shown.
For this logic tree, the leaves are basic events (BEs), which model component failures [4] and generally linked to the failure of components [5].
The BEs demonstrate root causes for the unpleasant event.
Each BE has a proper failure distribution (mostly Weibull and exponential distributions), its suitability is verified by goodness of fit techniques [4].
Nowadays, FTA method is the most used quantitative technique for accident scenario assessment in the industry [6]; however, this method is often used in the static form not proper for analyzing the complex systems.
Static Fault Tree (SFT)
The main assumptions for the use of the SFTs are [6,7]:
i) binary BEs;
ii) statistically independent BEs;
iii) instantaneous transition between the working and the failed state;
iv) restoration of components as good as new by maintenance; if the failure of a component influences other events on superior levels, its repair restores these events to the normal operative condition.
The way that events are connected to produce system failure, is represented by means of logical Boolean gates (AND; OR; Voting).
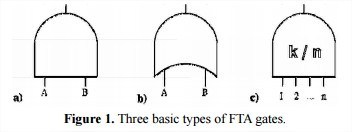
AND gate (Fig. 1-a) has failed output when all inputs fail, OR gate (Fig. 1-b) fails if at least one of inputs fails and Voting gate (Fig. 1-c) fails if at least k out of n inputs fails [4].
SFTs with AND, OR, and Voting (k of n) gates cannot encompass the dynamic behavior of system failure mechanisms [8].
To overcome this problem, Dynamic Fault Tree (DFT) analysis is suggested in recent research.
Dynamic Fault Tree
Most of reliability modeling techniques are based on statistical methods.
Their typical examples are reliability block diagram (RBD), FTA, and Markov chains [9].
These methods are not able to encompass the dynamic behavior of complex systems.
Dynamic reliability assessment methods were developed on common basic of static reliability analysis, in order to encompass the dynamic behavior of sequence, spare or time dependency actions or failures in the complex systems.
The key parameter to separate dynamic behavior from static behavior is the time.
Dynamic reliability approaches are powerful formalisms and invent a more realistic modeling of complex systems [10].
Among these new formalisms (DFT analysis, Dynamic RBDs, Boolean logic Driven Markov Process and etc.), which proposed to reliability calculation studies, DFT analysis has been the most used and practical one As compared with the SFT, DFT is a graphical model for the reliability studies that combines the ways how an undesired event (top event) can occur.
However, in a DFT, top event is a time dependent event.
DFT represents a better estimation of the traditional FT by including the time dependency [11].
Like a SFT, the DFT is a tree in which the leaves are BEs; however, in this approach, BEs are more realistic and detailed than SFT technique.
The main assumptions for the use of the DFTs are [12]:
i) binary BEs;
ii) Non-repairable components (recently, some efforts have been made to consider repair in DFT [5]).
By: Mohammad Pourgol-Mohammad, Ph.D, P.E, CRE, mpourgol@gmail.com
Previously published in the June 2015 Volume 6, Issue 2 ASQ Reliability Division Newsletter
Picture © B. Poncelet https://bennyponcelet.wordpress.com